No vienen del espacio exterior y tampoco servirán para el mundo del entretenimiento, sino para la seguridad de las personas. Y la diferencia mayor es que son reales, aunque están en la etapa de desarrollo. El proyecto de contar con robots que en un futuro cercano desactiven una bomba o exploren un lugar atestado de gases tóxicos en el país se está diseñando en San Juan, específicamente en el Instituto de Automática de la Facultad de Ingeniería, que depende de la Universidad Nacional de San Juan (UNSJ) y el Consejo Nacional de Investigaciones Científicas y Técnicas (Conicet).
Con más de 20 años de investigación acumulados, el instituto trabaja desde 2017 en el proyecto que presentó y resultó ganador en la convocatoria del Ministerio de Defensa de la Nación, para desarrollar el prototipo de un vehículo no tripulado, que sirva para inspeccionar en ambientes que representen un riesgo a la vida humana y para manipular a distancia sustancias que también resulten peligrosas.
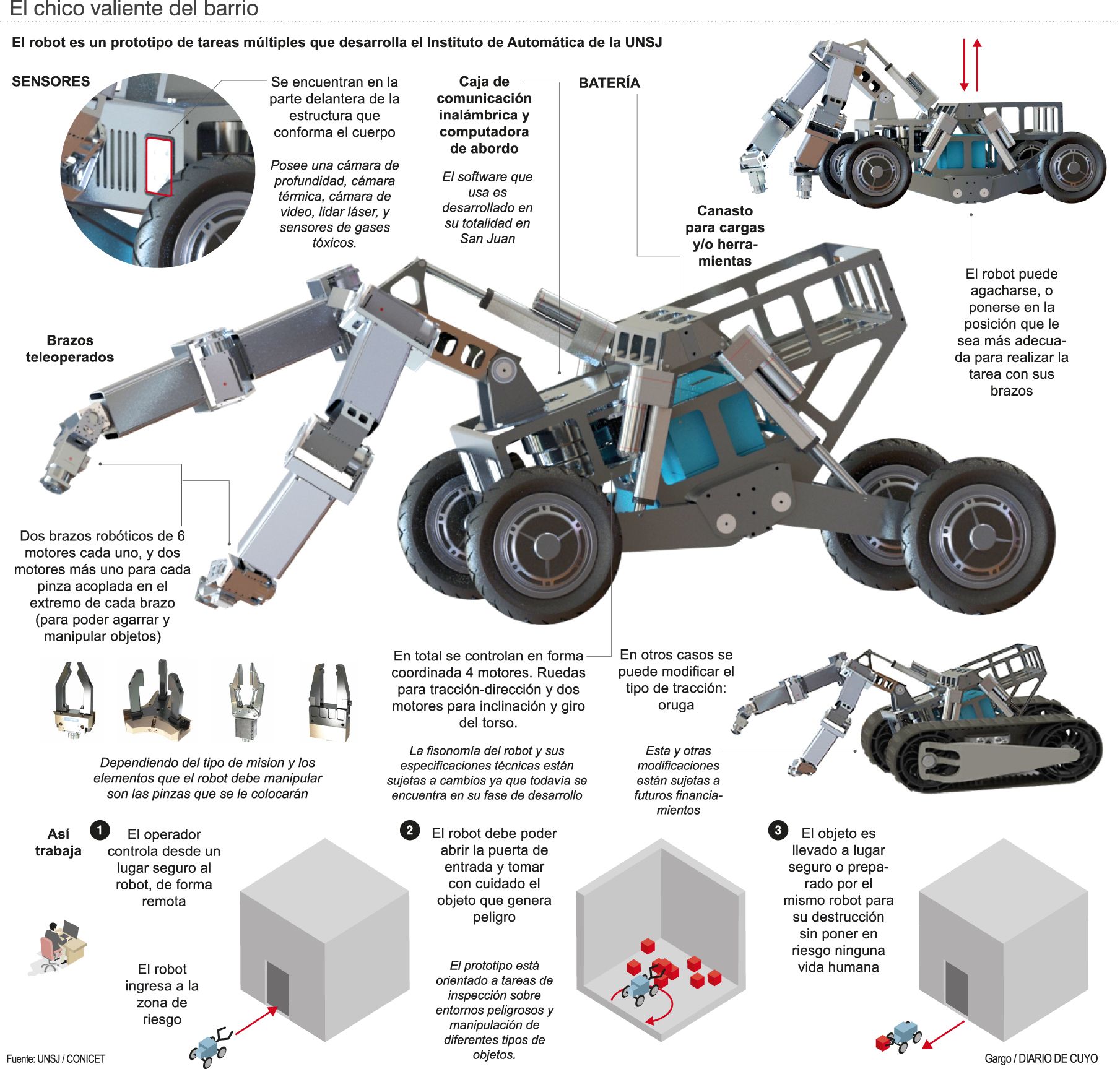
El instituto tiene plazo hasta septiembre del año que viene para realizar este prototipo, que en su aspecto consiste en una base con cuatro ruedas y dos brazos robóticos. Una vez desarrollado este sistema robótico, el Ministerio de Defensa podrá ir seleccionando las aplicaciones de uso que considere prioritarias.
El director del proyecto, Emanuel Slawintzki, afirmó que el objetivo del sistema robótico es "que se mueva en un ambiente que signifique riesgo para la vida humana, como el derrame de una sustancia peligrosa o el escape de gas nocivo, y que pueda manipular sustancias y objetos, que también representen un peligro, como ácido o explosivos".
Slawintzki se explayó en el último aspecto, que representa un desafío particular. Debido a que se manipulan objetos, el operador debe tener información extra para hacerlo correctamente. No se trata de manejar un auto a control remoto, que se define como telecomando. Como hay otros conceptos, hablan de teleoperación. "Por ejemplo, si se hace una tarea física, es necesario tener "tacto". Para mover algo que puede ser peligroso, hay que saber su peso. El fin es hacer siempre la tarea de forma remota", añadió el investigador. Para afrontar cada causa, el robot estará equipado con los sensores indicados.
Mediante dos "joysticks" y una pantalla, un teleoperador manejará al robot. La distancia, puede ser de 100 metros en adelante, según la tecnología (y su costo) que se decida emplear.
Vicente Mut es otro integrante del proyecto, quien resaltó que el principal valor agregado es que el cien por ciento del desarrollo del software se desarrollará en San Juan. Además, quedará el código abierto, por lo que en un futuro se podrá actualizar o ampliar dicho software, un ítem sumamente beneficioso, ya que importar este tipo de programas significa que además de ser más caros, vienen con el código cerrado, por lo que no se puede "adaptar" al robot a otra tarea que no sea la que ya trae configurada.
Equipo profesional e interdisciplinario
Al diseño y desarrollo en conjunto de mecánica, electrónica y software del sistema robótico lo realiza un grupo interdisciplinario de trabajo. El director del proyecto es Emanuel Slawintzki y el co-director, Carlos Soria. Además, entre sus integrantes, figuran Leopoldo Slawintzki, Pedro Campillo, Mario Muñoz, Diego Santiago, Lucio Salinas, Carlos Guevara, Pedro Bocca y Vicente Mut. También están involucrados los alumnos de Ingeniería Electrónica Emanuel Vallejo, Eduardo Gabriel Bustos Vogt, Fabricio Emder (recientemente graduado), Pablo García y Eduardo Luna. Todo el equipo de trabajo pertenece al Conicet y/o a la UNSJ.